wolf_3Dlyapunov.m
function lyapunov=wolf_3Dlyapunov(t,Y)
% 用wolf方法求三维实验数据最大李雅普洛夫指数
%
% 输入:演化时间间隔t,3维数据Y(:,1:3)
% 输出:lyapunov指数
%
% Author:yujunjie
% Author's email: ustb03-07@yahoo.com.cn
%
lyapunov=0;
YL=length(Y);
% 不同的系统以下两个参数可能要适当的改变
MaxFL=.5;
MaxEL=2.5;
fiducial1=1;
fiducial2=3;
for i=4:YL
if (sum(abs(Y(fiducial1,:)-Y(i,:)))<MaxFL)
fiducial2=i;
break;
end
end
evolveStep=1;
L1=norm(Y(fiducial1,:)-Y(fiducial2,:));
L2=norm(Y(fiducial1+evolveStep,:)-Y(fiducial2+evolveStep,:));
while (1)
if (fiducial1+evolveStep==YL)||(fiducial2+evolveStep==YL)
lyapunov=lyapunov+log(L2/L1);
fiducial1=fiducial1+evolveStep;
break;
elseif L2>MaxEL
lyapunov=lyapunov+log(L2/L1);
fiducial1=fiducial1+evolveStep;
fiducial2=fiducial2+evolveStep;
fiducial2=findreplace(Y,fiducial1,fiducial2,MaxFL);
evolveStep=1;
L1=norm(Y(fiducial1,:)-Y(fiducial2,:));
else
evolveStep=evolveStep+1;
end
L2=norm(Y(fiducial1+evolveStep,:)-Y(fiducial2+evolveStep,:));
end
fiducial1=fiducial1-1;
lyapunov=lyapunov/(t*fiducial1);
%---------------------------------------------------
function P=findreplace(Y,P1,P2,MaxL)
% 寻找替代点
P=P2;
YL=length(Y);
HYL=fix(YL/2);
k=1;
% 优先选择距离较小的,与被替代的点处于以基点为原点的坐标下相同象限中
for i=1:YL
if (sum(abs(Y(P1,:)-Y(i,:))) < MaxL ...
&& sign(Y(P2,1)-Y(P1,1))==sign(Y(i,1)-Y(P1,1))...
&& sign(Y(P2,2)-Y(P1,2))==sign(Y(i,2)-Y(P1,2))...
&& sign(Y(P2,3)-Y(P1,3))==sign(Y(i,3)-Y(P1,3)))
temp(k)=i;
k=k+1;
end
end
% 如没有满足上述条件的点不进行替代,否则取尽可能保持方向不变的点
% 此处采用取外积模最小的点
if k>1
P=temp(1);
PCross=norm(cross(Y(P1,:),Y(P,:)));
for i=2:k-1
PCross1=norm(cross(Y(P1,:),Y(temp(i),:)));
if PCross1 < PCross
P=temp(i);
PCross=PCross1;
end
end
end
|
取延迟Chen系统,方程如下:
+----------------------------------------+
| dx/dt=a*(y-x) |
| dy/dt=(c-a)*x+c*y-x*z+k*(y(t-tau)-y) |
| dz/dt=x*y-b*z |
+----------------------------------------+
其中 a = 35;b = 3;c = 28;
并且 k 和 tau 取以下值时都是非混沌
k = 2.4; tau = .2;
k = 2.8; tau = .15;
k = 4.6; tau = .3;
k = 0.8; tau = .5;
k = 2.65; tau = .16;
k = 4.2; tau = .1;
k = 3.29; tau = .13;
k = 2.3; tau = .18;
见dde_chen.m
如 k=0 即为不带延迟系统
>> history = [-3;-4;14];
tspan = [0,50];
a = 35;b = 3;c = 28;
k = 0;tau = .3;
opts = ddeset('MaxStep',1e-2);
sol = dde23(@dde_chenf,tau,history,tspan,opts,a,b,c,k);
Y=sol.y(1:3,2000:5000);
Y=Y';
plot3(Y(:,1),Y(:,2),Y(:,3));
l=wolf_3Dlyapunov(1e-2,Y)
l =
2.0094
==========================================
取k = 2.4;tau = .2;
>> history = [-3;-4;14];
tspan = [0,50];
a = 35;b = 3;c = 28;
k = 2.4;tau = .2;
opts = ddeset('MaxStep',1e-2);
sol = dde23(@dde_chenf,tau,history,tspan,opts,a,b,c,k);
Y=sol.y(1:3,2000:5000);
Y=Y';
plot3(Y(:,1),Y(:,2),Y(:,3));
l=wolf_3Dlyapunov(1e-2,Y)
l =
-0.0969
==========================================
取 k = 4.2;tau = .1;
>> history = [-3;-4;14];
tspan = [0,50];
a = 35;b = 3;c = 28;
k = 4.2;tau = .1;
opts = ddeset('MaxStep',1e-2);
sol = dde23(@dde_chenf,tau,history,tspan,opts,a,b,c,k);
Y=sol.y(1:3,2000:5000);
Y=Y';
plot3(Y(:,1),Y(:,2),Y(:,3));
l=wolf_3Dlyapunov(1e-2,Y)
l =
-0.2768
==========================================
取 k = .8;tau = .6; 是混沌系统
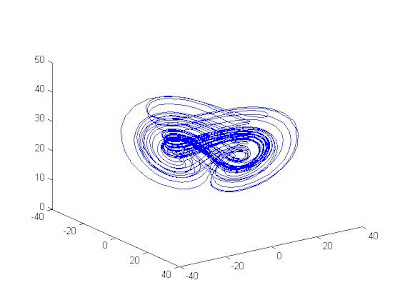
>> history = [-3;-4;14];
tspan = [0,50];
a = 35;b = 3;c = 28;
k = .8;tau = .6;
opts = ddeset('MaxStep',1e-2);
sol = dde23(@dde_chenf,tau,history,tspan,opts,a,b,c,k);
Y=sol.y(1:3,2000:5000);
Y=Y';
plot3(Y(:,1),Y(:,2),Y(:,3));
l=wolf_3Dlyapunov(1e-2,Y)
l =
3.0002
参考程序
dde_chen.m
dde_rossler.m
参考文献:
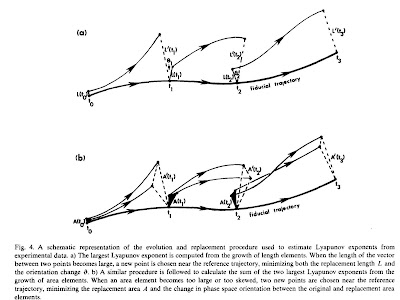
[1]Alan WOLF,Jack B.SWIFT,Harry L.SWINNEY and John A.VASTANO DETERMINING LYAPUNOV EXPONENTS FROM A TIME SERIES Physica 16D(1985)285-317













